
 13776045948
13776045948
按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。广泛应用于雕刻机、水晶研磨机、中型
它是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为步进电机的角位移,电机的转速与脉冲频率成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。
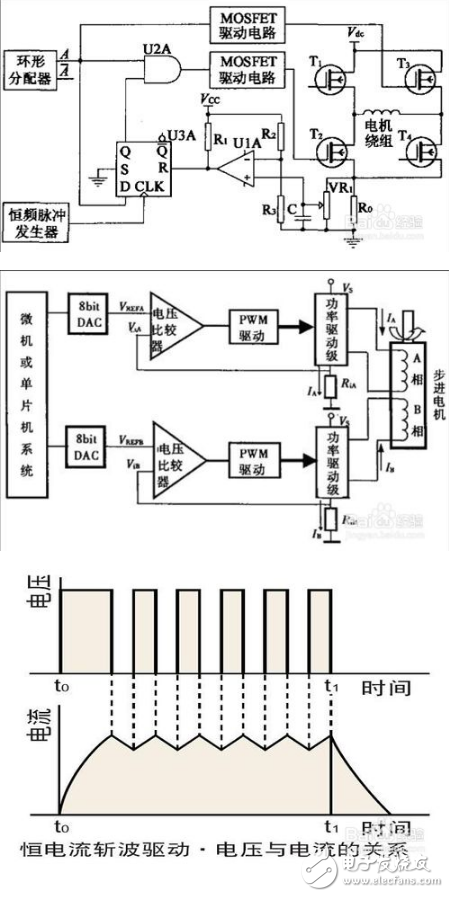
恒流控制的基本思想是通过控制主电路中MOSFET的导通时间,即调节MOSFET触发信号的脉冲宽度,来达到控制输出驱动电压进而控制电机绕组电流的目的。
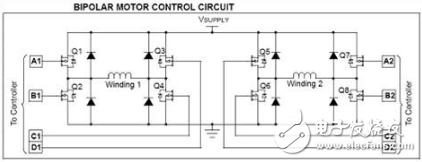
单极性 (unipolar) 和双极性 (bipolar) 是步进电机最常采用的两种驱动架构。单极性驱动电路使用四颗晶体管来驱动步进电机的两组相位,电机结构则如图1所示包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接。这类电机有时又称为四相电机,但这种称呼容易令人混淆又不正确,因为它其实只有两个相位,精确的说法应是双相位六线式步进电机。六线式步进电机虽又称为单极性步进电机,实际上却能同时使用单极性或双极性驱动电路。
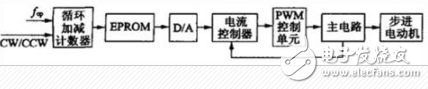
双极性步进电机的驱动电路则如图2所示,它会使用八颗晶体管来驱动两组相位。双极性驱动电路可以同时驱动四线式或六线式步进电机,虽然四线式电机只能使用双极性驱动电路,它却能大幅降低量产型应用的成本。双极性步进电机驱动电路的晶体管数目是单极性驱动电路的两倍,其中四颗下端晶体管通常是由微控制器直接驱动,上端晶体管则需要成本较高的上端驱动电路。双极性驱动电路的晶体管只需承受电机电压,所以它不像单极性驱动电路一样需要箝位电路。
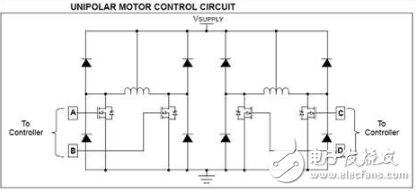
微步驱动技术是一种电流波形控制技术。其基本思想是控制每相绕组电流的波形,使其阶梯上升或下降,即在0和最大值之间给出多个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中间状态,对应于电机转子旋转的步数增多、步距角减小。采用细分驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避免低频共振及降低运行噪声 。
由于步进电机及驱动器型号较多、种类较多,用户在选择时应有一定的讲究,这样才能以最优的性能、最低的价格选择好自己所需的产品。
最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。或者根据负载特性从理论上计算出来。
由于步进电机是控制类电机,所以目前常用步进电机的最大力矩不超过45Nm,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。
转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如:驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。在设计方案时,应使电机的转速控制在600转/分或800转/分以内,当然这样说很不规范,可以参考〈矩-频特性〉。
3、根据负载最大力矩和最高转速这两个重要指标,再参考〈矩-频特性〉,就可以选择出适合自己的步进电机。如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。要选择好合适的减速比,要综合考虑力矩和速度的关系,选择出最佳方案。
5、可以先选择混合式步进电机,如果由于价格因素,可以选取反应式步进电机。
7、选取时且勿走入只看电机力矩这一个指标的误区,也就是说并非电机的扭矩越大越好,要和速度指标一起考虑。
8、超小型驱动器和微型驱动器是靠外壳作为散热器的,应固定在较大、较厚的金属板上或外加风机散热,如果没有散热条件,而驱动器又工作在转速较低的场合(这时驱动器发热较大),可以选用带风机的90型驱动器代替。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

电源,且它受外部的脉冲信号和方向信号控制(这里举例是西门子PLC输出脉冲),进而控制
1、工作原理 2、步距角以及一圈所需步数的计算 二、硬件连接 三、STM32F103定时
式电动机,是一种极具特色的电动机,它既可以实现位移控制,又具有高精度、高响应速度、可靠的特点,广泛应用于工业控制、汽车控制、医疗设备、仪器仪表、机器人以及
的调整包括两个方面:电气参数的设置和运动参数的调整。电气参数的设置包括电流、细分数、
安装有带永久磁性的转子,而定子至少具有两个绕线。当转子磁性与定子绕线保持一致时,将
随着电力电子技术的飞速发展,变频调速的性能指标完全可以达到甚至超过直流
。它使用四个 MOSFET IRFZ44。该电路可以在独立式或 PC 控制模式下运行。
按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
到底是一种什么样的装置,一般都是不那么清楚的,至少可以说并没有全面的了解。
之后 ,它经过环形分配器和细分电路处理,再经过功率放大器把信号放大,我在给大家介绍PLC的时候就讲过,PLC它输出的脉冲信号是比较小的,它必须要经过
如何接线,今天荣久以动态图的模式为大家讲解,以下是控制要求、所需硬件和
在控制系统中具有普遍的应用。它能够把脉冲信号转换成角位移并且可用作电磁制动轮、电磁差分器、或角位移发作
的指示灯提示来判断,其实并不是每一次都会报警的,如果出现报警的时候,并且确保接线是没有错的,
按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行
按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过
的稳态性能和动态特性的目的,本文结合转矩矢量控制策略,提出基于DSP的
设计方案。通过采用最大电流/转矩的转子磁场定向失量控制,完成对两相混合式
,用户可以设置200 ~ 40000内的细分以及额定电流内的任意电流值。
的原理以及接线图,但却还不知道如何实操,接下来就以ZHH-MC两相混合式
,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为
的设计方案,可实现全步、半步控制。该方案具有体积小、成本低、功耗低和可靠性高等优点。
芯片3955引脚及功能介绍(1)3955概述及其引脚功能由Allegro公司生产的3955是一种用来
(RC-204A、207A、231(HA)、233A、RC-410A、420A)型
在控制系统中具有广泛的应用。它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、
在控制系统中具有广泛的应用。它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移
电路,由于L297 内部带有斩波恒流电路, 绕组相电流峰值由Uref 确定。当采用两片L297

服务热线