
 13776045948
13776045948
平移台,电控平移台,位移台,长焦物镜,长工作距物镜等机,光,电一体的研发、生产制造、*的企业,公司秉承以诚为本,以质取胜的宗旨,致力于把*、高品质的仪器提供给广大用户,并且为客户引见,解决检测全套设备方案, 可根据不同客户的需要,提供机械设计、机器视觉光源设计、非标准光纤设计等技术服务。
我们的经营理念:客户至上,诚信为本!以热诚周到的服务,快捷的反应,为客户提供高性价比的产品。
北京派迪威仪器有限公司的产品无论是光学性能还是光学设计都为显微镜指引了新的发展方向。减轻操作者的视觉疲劳,操作便捷,灵活性好,提高了工作效率。
公司产品目前主要有:立体显微镜,测量显微镜,视频显微镜,金相显微镜,生物显微镜,倒置显微镜,读数显微镜,显微镜图像分析系统,高清VGA工业摄像机,数字摄像机,光导纤维冷光源,LED照明灯,环形荧光灯,放大镜等.LCD视频显微镜,是公司有特色和前景的产品.产品注重模块化,集成化,广泛应用于电子和精密工业检测,实验室及测量仪器行业、科研院校。
DM542S 是公司新推出的高性能数字式两相步进驱动器,采用32 位DSP技术,用户可以设置常用的 8 档电流以及 16 档细分,能够满足大多数场合的应用需要。低中高速运行都很平稳,噪音小。多种功能可通过外部拨码选择,极大地方便了客户的应用。
适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、自动装配设备等。
※推荐采用侧面安装,散热效果更佳,安装设计时,需要考虑接线端子大小和散热所需空间!
1)驱动器的可靠工作温度通常在 60℃以内,电机工作温度为 80℃以内;
2)建议使用时选择自动半流方式,马达停止时电流自动减一半,以减少电机和驱动器的发热;
3)安装驱动器时请采用竖着侧面安装,使散热齿形成较强的空气对流;必要时机内靠近驱动器处安装风扇,强制散热,保证驱动器在可靠工作温度范围内工作。
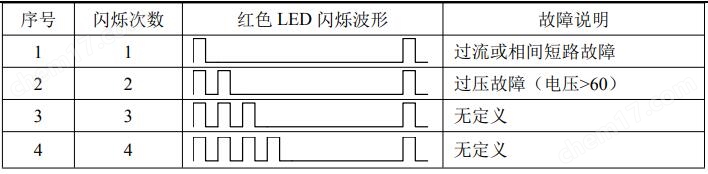
绿色 LED 为电源指示灯,当驱动器接通电源时,该 LED 常亮;当驱动器切断电源时,该 LED 熄灭。红色 LED 为故障指示灯,当出现故障时,该指示灯以3 秒钟为周期循环闪烁;当故障被用户清除时,红色 LED 常灭。红色 LED 在 3 秒钟内闪烁次数代表不同的故障信息,具体关系如下表所示:
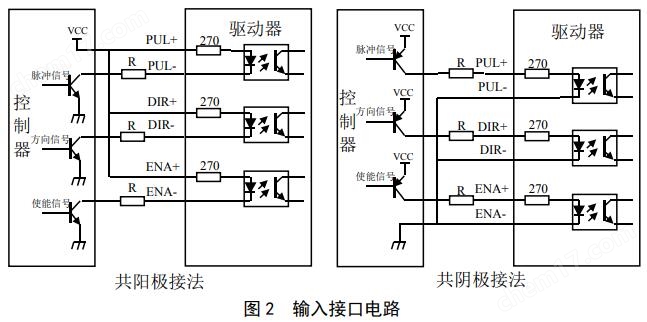
DM542S 驱动器采用差分式接口电路可适用差分信号,单端共阴及共阳等接口,内置高速光电耦合器,允许接收长线驱动器,集电极开路和 PNP 输出电路的信号。在环境恶劣的场合,我们推荐用长线驱动器电路,抗干扰能力强。现在以集电极开路和 PNP 输出为例,接口电路示意图如下:
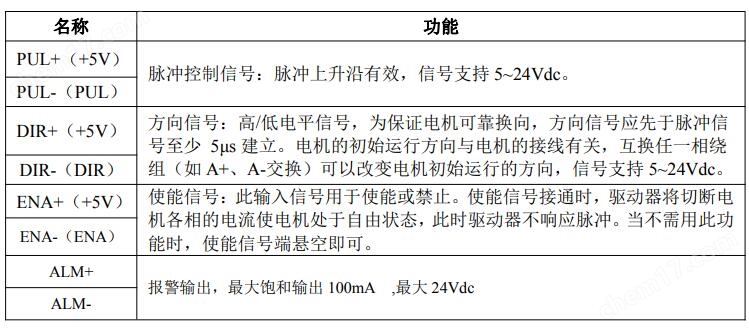
为了避免一些误动作和偏差,PUL、DIR 和 ENA 应满足一定要求,如下图所示:
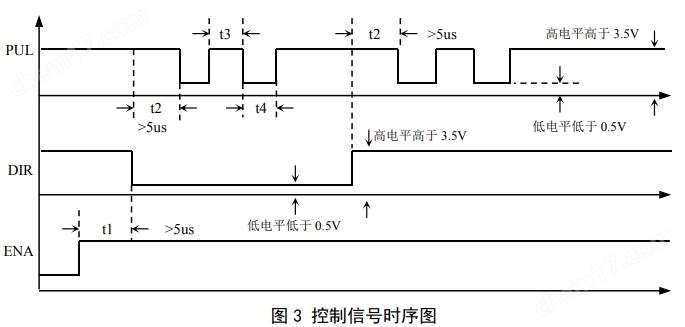
2)t2:DIR 至少提前 PUL 下降沿 5μs 确定其状态高或低。
2)脉冲和方向信号线与电机线不允许并排包扎在一起,最好分开至少10cm以上,否则电机噪声容易干扰脉冲方向信号引起电机定位不准,系统不稳定等故障。
3)如果一个电源供多台驱动器,应在电源处采取并联连接,不允许先到一台再到另一台链状式连接。
4)严禁带电拔插驱动器电机和电源端子,带电的电机停止时仍有大电流流过线圈,拔插电机和电源端子将导致巨大的瞬间感生电动势将烧坏驱动器。
5)严禁将导线头加锡后接入接线端子,否则可能因接触电阻变大而过热损坏端子。
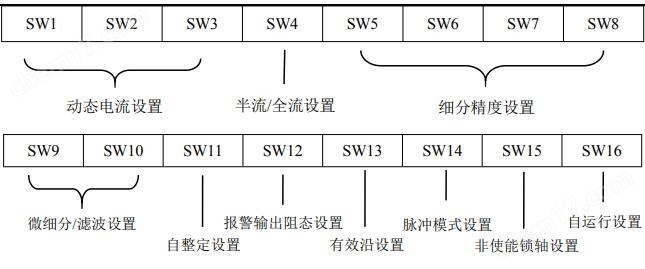
SW4=off:(出厂默认)驱动器停止接收脉冲约 0.4 秒后,输出电流为峰值的 50%(设置半流,在某些应用场合可以降低驱动器和电机的发热);

SW12=off:正常工作情况下,报警输出为低阻态(导通状态)(出厂默认),当驱动器发生报警时,报警输出为高阻(非导通状态);
SW12=on:正常工作情况下,报警输出为高阻态(非导通状态),当驱动器发生报警时,报警输出为低阻(导通状态)。
SW15=off:当驱动器非使能时,不响应脉冲,无电流输出,电机不锁(出厂默认);
SW16=on:电机以 0.2R/S 的速度,正转一圈,反转一圈,一直循环。
3)采用非稳压电源时,电源电流输出能力应大于驱动器设定电流的 60%即可;
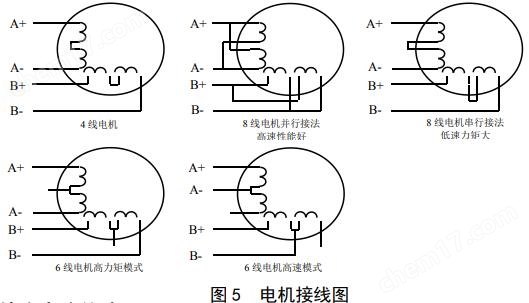
DM542S 可以用来驱动 4、6、8 线的两相、四相混合式步进电机,步距角为 1.8 度和 0.9度。选择电机时主要由电机的扭矩和额定电流决定。扭矩大小主要由电机尺寸决定。尺寸大的电机扭矩较大;而电流大小主要与电感有关,小电感电机高速性能好,但电流较大。

●电机实际电流越大,输出转矩越大,但电机铜损(P=I2R)越多,电机发热偏多;
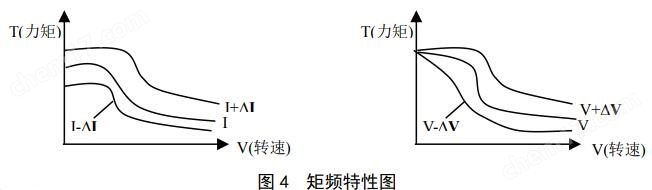
对于同一电机,电流设定值越大时,电机输出力矩越大,但电流大时电机和驱动器的发热也比较严重。具体发热量的大小不仅与电流设定值有关,也与运动类型及停留时间有关。以下的设定方式采用步进电机额定电流值作为参考,但实际应用中的最佳值应在此基础上调整。原则上如温度很低(40℃)则可视需要适当加大电流设定值以增加电机输出功率(力矩和高速响应)。
△注意:电流设定后请运转电机 15-30 分钟,如电机温升太高(70℃),则应降低电流设定值。所以,一般情况是把电流设成电机长期工作时出现温热但不过热时的数值。
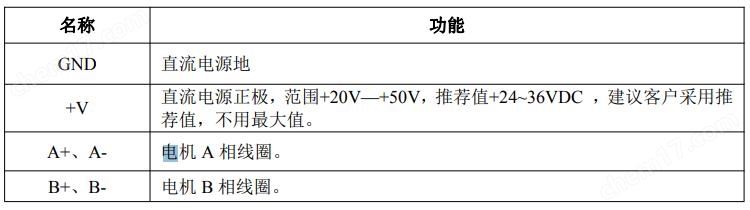
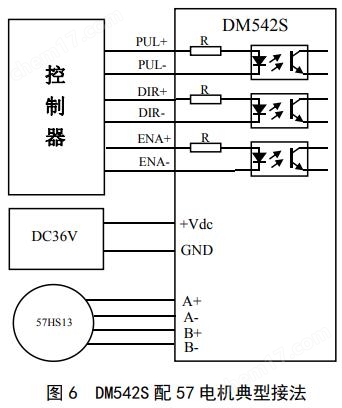
七、典型接线 系列电机串联,并联接法(若电机转向与期望转向不同时,仅交换 A+、A-的位置即可),DM542S 驱动器能驱动四线、六线或八线的两相/四相电机。下图是 DM542S 配 57HS13步进电机的典型接法:
3)DM542S 驱动器只能驱动两相混合式步进电机,不能驱动三相和五相步进电机。
4)判断步进电机串联或并联接法正确与否的方法:在不接入驱动器的条件下用手直接转动电机的轴,如果能轻松均匀地转动则说明接线正确,如果遇到阻力较大和不均匀并伴有一定的声音说明接线错误。
1) 短路保护当发生相间短路或驱动器内部过流时,驱动器红灯闪亮1 次,且在3 秒内反复闪亮。此时必须重新上电复位,才能排出故障。

步进电机是一种专门用于速度和位置精确控制的特种电机,它旋转是以固定的角度(称为“步距角”)一步一步运行的,故称步进电机。其特点是没有累积误差,接收到控制器发来的每一个脉冲信号,在驱动器的推动下电机运转一个固定的角度,所以广泛应用于各种开环控制。步进驱动器是一种能使步进电机运行的功率放大器,能把控制器发来的脉冲信号转化为步进电机的功率信号,电机的转速与脉冲频率成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。
步进电机的转速与脉冲频率的关系是什么?步进电机由于自身*结构决定,出厂时都注明“电机固有步距角”(如0.9°/1.8°,表示半步工作每走一步转过的角度为 0.9°,整步时为 1.8°)。但在很多精密控制和场合,整步的角度太大,影响控制精度,同时振动太大,所以要求分很多步走完一个电机固有步距角,这就是所谓的细分驱动,能够实现此功能的电子装置称为细分驱动器。


●脉冲模式不匹配,信号是脉冲/方向,驱动器必须设置为此模式;若信号是CW/CCW(双脉冲模式),驱动器则必须也是此模式,否则电机只朝一个方向运转。

服务热线